DefCon – Deformation control for increasing the machining accuracy of thin-walled workpieces
| E-Mail: | wnendt@ifw.uni-hannover.de |
| Team: | Eike Wnendt |
| Year: | 2023 |
| Funding: | Central Innovation Programme for small and medium-sized enterprises (ZIM) |
| Duration: | 04/2023-05/2025 |
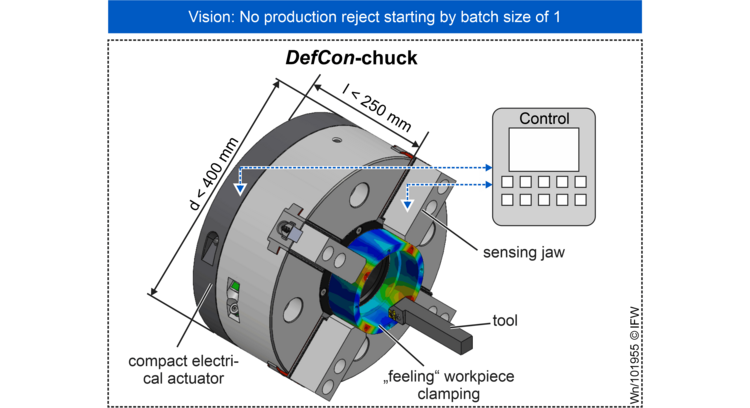
During turning operations, chucks are used to securely clamp the workpiece. The chuck has a significant influence on the achievable machining accuracy. The main cause of dimensional and shape deviations is the clamping force applied onto the workpiece.
The clamping force leads to elastic deformation of the workpiece. In this deformed status, the workpiece is machined. After turning, the clamping force is released which results to a permanent workpiece deformation due to the elastic spring-back effect. In consequence, the achievable dimensional and shape tolerance of the workpiece is limited.
Therefore, the clamping force is normally adjusted manually in a time-consuming iterative process step especially for thin-walled workpieces. For small batch sizes, this leads to increased production costs or rejects due to additional effort during process run-in.
Objective of the project
The aim of the project is to develop a new chuck for controlling workpiece deformation. A new actuator is being developed that enables a much more precise adjustment of the clamping force compared to conventional chucks. This makes it possible for the first time to significantly minimise clamping force variations which occur when the clamping force is adjusted manually. In production practice, the new actuator results in higher reproducibility of workpiece clamping.
With the new actuator, we are implementing deformation control. The aim for the new chuck is to automatically set the optimum clamping force based on a specified manufacturing tolerance, for example. For users of the new chuck, the deformation control can serve as an assistance system that relieves the operating personnel during process set-up.
Advantages
- Process reliability – reduction of clamping force uncertainties
- Higher productivity – less rejects
Procedure
In the ZIM co-operation project ‘DefCon’, we are developing and researching a new chuck for controlling workpiece deformations. We are first developing and integrating a new actuator into the chuck that enables precise control of the clamping force. Based on this, the relationship between workpiece geometry (e.g. workpiece diameter), clamping force and the resulting workpiece deformation is analysed experimentally and converted into the form of a characteristic map. Using the map, it is then possible to calculate the optimum target clamping force based on a given workpiece geometry and target deformation. By controlling the clamping force, we also control the workpiece deformation. The control of the workpiece deformation is initially tested using ring-shaped, thin-walled workpieces.
Are you also interested in a co-operation project?
Please contact Eike Wnendt via E-Mail to wnendt@ifw.uni-hannover.de or by calling +49 511 762 18257.