Aktive Schwingungsdämpfung eines Zerspanroboters mit Hybridantrieb
| E-Mail: | araoud@ifw.uni-hannover.de |
| Team: | Taha Araoud |
| Jahr: | 2023 |
| Förderung: | Deutsche Forschungsgemeinschaft – DFG |
| Laufzeit: | 10/23 - 07/26 |
Der zunehmende Einsatz von Industrierobotern in der spanenden Bearbeitung verspricht Flexibilität und Kosteneffizienz. Dem stehen jedoch Herausforderungen wie geringe Getriebesteifigkeit und Schwingungsanfälligkeit der Roboterachsen gegenüber. Werkzeugmaschinen hingegen bieten im Vergleich höhere Präzision, sind jedoch deutlich teurer in der Anschaffung. Vor dem Hintergrund dieser Herausforderungen haben wir bereits mehrere Arbeiten zum Thema Roboterzerspanung durchgeführt.
Zielsetzung des Projekts
Das Projekt „Aktive Schwingungsdämpfung eines Zerspanroboters mit Hybridantrieb“ (ASK-ROB) hat das Ziel, eine modellbasierte Regelungsmethode zur aktiven Schwingungsdämpfung zu entwickeln. Dadurch soll die Bearbeitungsgenauigkeit von Zerspanungsrobotern gesteigert werden.
Vorteile
- Industrierobotereinsatz in der Zerspanung – höhere Flexibilität und Kosteneffizienz
- aktive Schwingungsdämpfung mittels zusätzlichen Aktors – Steigerung der Bearbeitungsgenauigkeit
Vorgehen
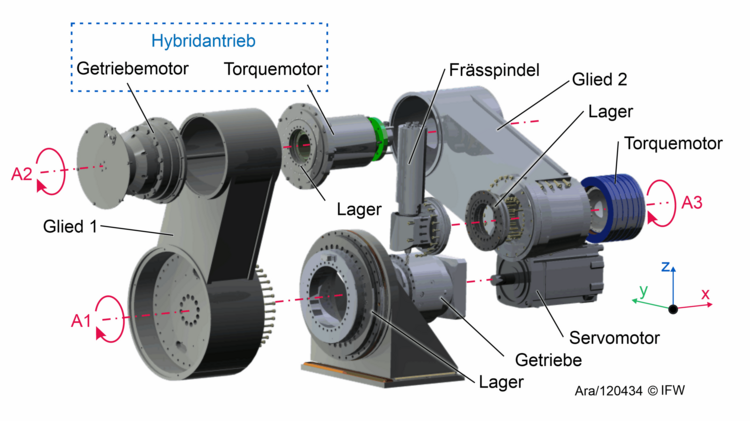
Der an unserem Institut entwickelte Innoflex-Roboter zeichnet sich im Vergleich zu herkömmlichen Industrierobotern durch eine höhere Steifigkeit aus, die durch seinen Aufbau und die Verwendung von einer WITTENSTEIN Galaxie®-Getriebe gewährleistet wird. Ausgestattet mit drei Drehachsen und einer Linearachse kann der Tool Center Point (TCP) in verschiedenen Raumebenen ausgerichtet werden. Ein wesentliches Element der Roboterkinematik ist die zweite rotatorische Achse, die durch ein hybrides Antriebskonzept aus Getriebe- und Torque-Motor aktiv versteift wird, was die statische Steifigkeit im Vergleich zu konventionellen Antrieben um das Zehnfache steigert.
Unser Projekt konzentriert sich auf die Entwicklung einer modellbasierten Regelungsmethode zur aktiven Schwingungsdämpfung (ASD) der Roboterstruktur. Hierbei wird das nichtlineare, posenabhängige Schwingungsverhalten berücksichtigt, indem ein mehrdimensionales Mehrkörpermodell des Roboters erstellt wird. Die Regelparameter werden an die spezifische Roboterpose angepasst. Ein besonderer Schwerpunkt liegt auf der Entkopplung der beiden Regler des Hybridantriebs. Abschließend wird mithilfe von Zerspanversuchen das Potenzial der Regelungsmethode im Zerspanungsprozess untersucht.
Sie haben auch Interesse an einem Kooperationsprojekt?
Kontaktieren Sie Mohamed Taha Araoud per E-Mail an araoud@ifw.uni-hannover.de oder telefonisch unter +49 511 762 18340.