PoliControl: Verfügbarkeit eines robotergestützten Polierprozesses zum Einstellen von Oberflächentopografien
| E-Mail: | voelker@ifw.uni-hannover.de |
| Team: | Hendrik Voelker |
| Jahr: | 2023 |
| Förderung: | Zentrales Innovationsprogramm Mittelstand (ZIM) |
| Laufzeit: | 07/2023 – 06/2025 |
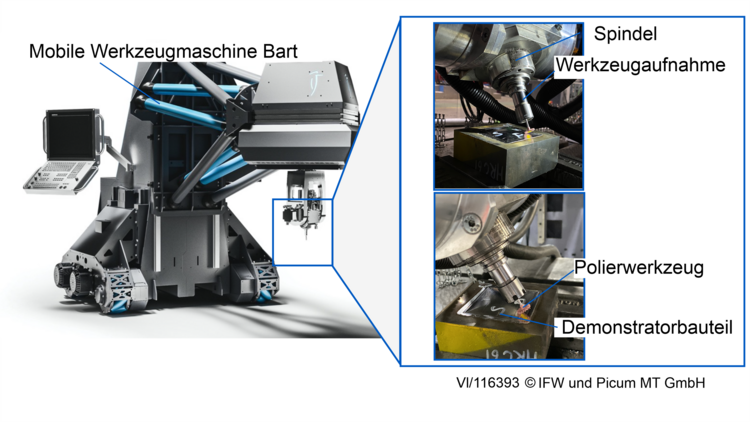
Mit dem Vor-Ort-Digitalisieren, dem Lichtbogenschweißen und dem Fräsen hat die Picum MT GmbH bereits wichtige Verfahren der Prozesskette zur Werkzeugreparatur in eine mobile Werkzeugmaschine integriert. Im Fall der Bearbeitung von Umformwerkzeugen ist die erzielbare Genauigkeit vergleichbar mit konventionellen Bearbeitungszentren. Um die Prozesskette zur Werkzeugreparatur vollständig abzubilden, integrieren wir im Rahmen des Projekts PoliControl die Feinbearbeitung in Form des Polierens (Finishens).
Das Polieren ist entscheidend für die Oberflächenqualität von Presswerkzeugen, jedoch aufwändig und abhängig von der ausführenden Fachkraft. Im „Tryout“ markierte Toleranzabweichungen werden manuell poliert, was mehrere Tage dauert und oft nicht reproduzierbar ist. Sinkende Fachkräftezahlen erschweren zudem die Wirtschaftlichkeit in Hochlohnländern.
Zielsetzung des Projekts
Ziel des Projekts ist die Automatisierung des Polierprozesses einer mobilen Werkzeugmaschine. So sollen die geforderte Oberflächenqualität und Genauigkeit effizienter erreicht werden.
Vorteile
- Unabhängigkeit vom Fachkräftemangel – durch die Automatisierung des Polierprozesses
- höhere Wirtschaftlichkeit – geringere Personalkosten, weniger Zeitaufwand, kein Transport
- höhere Oberflächenqualität und Genauigkeit - geringere Toleranzabweichungen durch Automatisierung
Vorgehen
Durch eine Automatisierung soll das Polieren in eine mobile Werkzeugmaschine integriert werden, wodurch die gesamte Prozesskette abgebildet werden kann. Dies ermöglicht Reparaturen direkt vor Ort, reduziert Rüstvorgänge und verkürzt Reparaturzeiten von Wochen auf wenige Tage.
Im Projekt adressieren wir zudem technologische Herausforderungen wie Prozessplanung und Werkzeugauswahl. Diese setzen wir mit Methoden der Künstlichen Intelligenz um.
Sie haben auch Interesse an einer Zusammenarbeit?
Kontaktieren Sie Hendrik Voelker per E-Mail an voelker@ifw.uni.hannover.de oder telefonisch unter +49 511 762 8078.